



Quadcopter FX Simulator



وصف لـQuadcopter FX Simulator
A Quadcopter / Multirotor RC Drone simulator with First Person View (FPV), HUD, Return Home, Course Lock, Home Lock, Camera Gimbal, Acro mode, Acro 3D mode and more..
Now Google Cardboard VR is also supported for immersive flying and FPV experience.
Support for Controllers
Please note that this a simulator and Not a game. It is designed for RC enthusiasts to practice Flying skills.
Basic Tutorial for beginner is in the above description video.
Minimum Screen resolution required is 800 x 480 px. Minimum Recommended RAM is 1 GB. We are open to suggestions and problems. You can always email us at our support email.
Features:
1) Based on real physics Model of Quadcopter
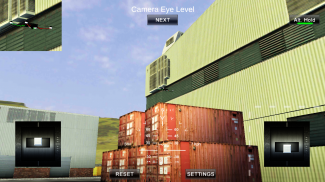
2) Interactive selection of different cameras modes:
* Eye level Camera
* First Person View Camera
* Stabilized Gimbal Camera
* Follow Camera
You can walk around while flying, looking at the quad either by dragging the middle of screen or by enabling accelerometer button on the left side in the Eye level Camera Mode..
3) Return to Location (RTL)
When on the Quad will automatically Return and Land back in its Landing Position. It will Automatically switch on when the Quad goes out of range.
4) Position Hold
When ON the Quad will try to Hold its position when both control sticks are released.
5) Course Lock
When ON the Forward, Backward, Left and Right will remain same regardless of orientation of Quad. e.g. Moving Right stick Forward will always make the Quad go forward in East Direction even if its pointing towards north.
6) Home Lock
When ON the Forward will always be Away from you and Backwards will always be towards you regardless of Quads Orientation.
7) Heads up Display(HUD)
Displaying real-time Pitch, Roll, Heading, Altitude and Speed.
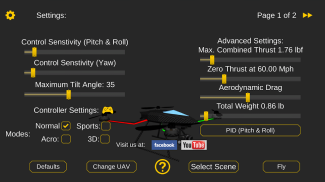
8) Adjustable Control sensitivity Settings
9) Auto Stabilizing adjustable
10) Altitude Hold Switch
If ON the quad will try to maintain the altitude when it was switched on.
11) Advanced Settings
If enabled users can change the Total Weight, Static / Dynamic thrust, PID setting and Aerodynamic Drag values.
12) Multiple Quad / Scene Selection / Some basic Challenges for Time Pass..
13) Multiple mode Input Support.
Now it supports mode1, mode2. mode3, mode4 and accelerometers. You can change via settings page
14) Camera rotation in FPV and Gimbal camera.
Click and Drag from center of screen on FPV or Gimbal camera. Double click in center to reset.
15) Dynamic Wind
Wind effect will reduce when behind the building.
16) Google cardboard Support for immersive virtual reality and FPV experience.
Make sure that you have a controller attached to the device because the only way you can control the quadcopter is by controller once the Cardboard VR is enabled. After enabling you have to gaze at the buttons on the UI and press the trigger button on the cardboard to click it. Once you are flying then pressing the trigger anywhere will open the settings page. You can also touch on screen anywhere to execute trigger event instead of pressing the trigger button.
17) Max Tilt Angle / Auto Stabilize Sensitivity Slider
In Normal Mode the slider changes the Maximum Tilt angle setting. This settings determines the maximum roll / pitch angle the quadcopter will tilt. In Sports Mode it changes the Auto Stabilize sensitivity. The higher the settings the more force is applied to stabilize the quadcopter.
18) Acro / Acro 3d mode for expert flying
Auto stabilize will not be applied in these modes. You need to be expert to fly in this mode.In 3D Mode is mode in which the Quadcopter can fly upside down also. The throttle sticks will produce reverse thrust when moved down from the center position.
Enjoy Flying..
Credits: Some Arteria content is in use.
</div> <div jsname="WJz9Hc" style="display:none">A محاكاة Quadcopter / Multirotor RC الطائرة بدون طيار مع أول شخص عرض (FPV)، HUD، عودة الرئيسية، قفل ملعب المنزل قفل، كاميرا انحراف، ووضع انحلال، ووضع انحلال 3D والمزيد ..
الآن ويدعم جوجل كرتون VR أيضا للطيران غامرة وتجربة FPV.
الدعم لتحكم
يرجى ملاحظة أن هذا محاكاة وليس لعبة. وهي مصممة لعشاق RC لممارسة مهارات الطائر.
دروس للمبتدئين الأساسي هو في وصف الفيديو أعلاه.
دقة الشاشة الحد الأدنى المطلوب هو 800 × 480 بكسل. الحد الأدنى RAM الموصى بها هي 1 GB. نحن منفتحون على اقتراحات ومشاكل. يمكنك الكتابة لنا دائما في البريد الإلكتروني لدينا الدعم.
الميزات:
1) بناء على نموذج الفيزياء الحقيقي للQuadcopter
2) التفاعلية مجموعة من الكاميرات وسائط مختلفة:
* مستوى العين كاميرا
* أول شخص عرض الكاميرا
* استقرت كاميرا انحراف
* متابعة كاميرا
يمكنك التجول أثناء الطيران، وتبحث في رباعية إما عن طريق سحب منتصف الشاشة أو من خلال تمكين زر التسارع على الجانب الأيسر في العين وضع مستوى الكاميرا ..
3) العودة إلى الموقع (RTL)
عندما على رباعية سيعود تلقائيا والأرض مرة أخرى في الوظيفة هبوطه. وسوف تتحول تلقائيا عندما يذهب رباعية خارج النطاق.
4) الموضع الذي تشغله
عندما ON رباعية ستحاول عقد موقفها عندما يتم الإفراج كلا العصي السيطرة.
5) قفل ملعب
عندما ON إلى الأمام، إلى الوراء، اليسار واليمين سيبقى نفسه بغض النظر عن التوجه للرباعية. مثلا سوف تتحرك العصا اليمنى إلى الأمام دائما على رباعية المضي قدما في اتجاه الشرق حتى لو كان لافتا نحو الشمال.
6) الرئيسية قفل
عندما ON إلى الأمام وسوف يكون دائما بعيدا عنك، وسوف يكون دائما إلى الوراء نحو لكم بغض النظر عن سبقتها التوجيه.
7) رؤساء متابعة العرض (HUD)
عرض في الوقت الحقيقي الملعب لفة، العنوان، الارتفاع والسرعة.
8) إعدادات حساسية تحكم قابل للتعديل
9) السيارات الاستقرار قابل للتعديل
10) ارتفاع عقد التبديل
إذا ON رباعية ستحاول الحفاظ على ارتفاع عند تشغيله.
11) إعدادات متقدمة
إذا يمكن للمستخدمين تمكين تغيير إجمالي الوزن، ثابت / التوجه الحيوي، ووضع PID والقيم الديناميكا الهوائية.
12) متعددة اختيار رباعية / المشهد / بعض التحديات الأساسية لتمرير الوقت ..
13) متعددة وضع الإدخال الدعم.
الآن أنه يدعم MODE1، MODE2. MODE3، MODE4 والتسارع. يمكنك تغيير عبر صفحة إعدادات
14) دوران الكاميرا في FPV وكاميرا انحراف.
انقر واسحب من مركز الشاشة على FPV أو كاميرا انحراف. انقر مرتين في مركز لإعادة.
15) دينامية الرياح
وتأثير الرياح تقلل عندما خلف المبنى.
16) دعم من الورق المقوى جوجل عن الواقع الافتراضي غامرة وتجربة FPV.
تأكد من أن لديك جهاز تحكم تعلق على الجهاز لأن الطريقة الوحيدة التي يمكنك السيطرة على quadcopter هي التي تحكم بمجرد تمكين VR الكرتون. بعد تمكين عليك أن تحدق في أزرار على واجهة المستخدم واضغط على زر الزناد على الورق المقوى لفوقه. مرة كنت مسافرا ثم الضغط على الزناد في أي مكان ستفتح صفحة الإعدادات. يمكنك أيضا لمس على الشاشة في أي مكان لتنفيذ الحدث الزناد بدلا من الضغط على زر الزناد.
17) استقرار ماكس زاوية ميل / سيارات الحساسية المتزلج
في الوضع العادي المنزلق تغيير إعداد أقصى زاوية الميل. هذه الإعدادات تحدد الحد الأقصى لزاوية لفة / الملعب وإمالة quadcopter. في الوضع الرياضي فإنه يغير السيارات استقرار حساسية. ارتفاع الإعدادات يتم تطبيق المزيد من القوة لتحقيق الاستقرار في quadcopter.
18) وضع انحلال / انحلال 3D للطيران الخبراء
لن يتم تطبيق في هذه الأوضاع الاستقرار السيارات. عليك أن تكون خبيرا ليطير في هذا الوضع 3D mode.In هو الوضع الذي وQuadcopter يمكن أن تطير رأسا على عقب أيضا. سوف تنتج العصي خنق عكس الاتجاه عندما انتقلت إلى أسفل من موقع المركز.
يتمتع الطائر ..
القروض: بعض المحتوى الشريان قيد الاستخدام.</div> <div class="show-more-end">
Quadcopter FX Simulator - إصدار 1.75c
(23-08-2019)

Quadcopter FX Simulator - معلومات APK
نُسخة APK: 1.75cالحزمة: com.Creativeworld.QuadcopterFXآخر إصدار من Quadcopter FX Simulator














تطبيقات من الفئة نفسها








